Towards the limits: Sensing Capability Measurement for ISAC Through Channel Encoder
September 29, 2024
Background
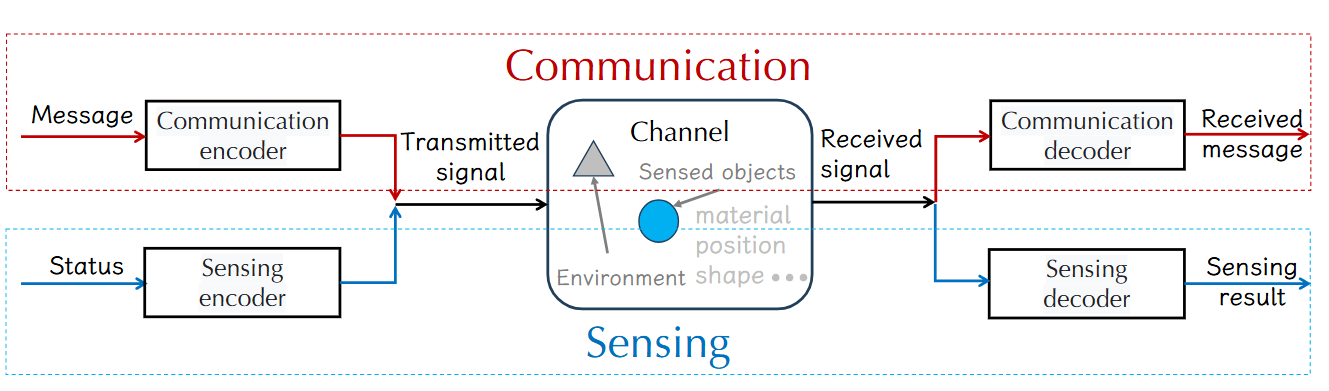
ISAC has been conceptualized, designed, and optimized for making communication and sensing functions complementary to each other. The different goals bring the inherent trade-off between communication and sensing performance when integrating them together.
Motivation
Howerve, it doesn’t work well for the following two reasons.
The relationship between the sensing capability of such features and the signal itself is ambiguous.
The sensing capability analysis must be designed to operate for all possible types.
Model definitions
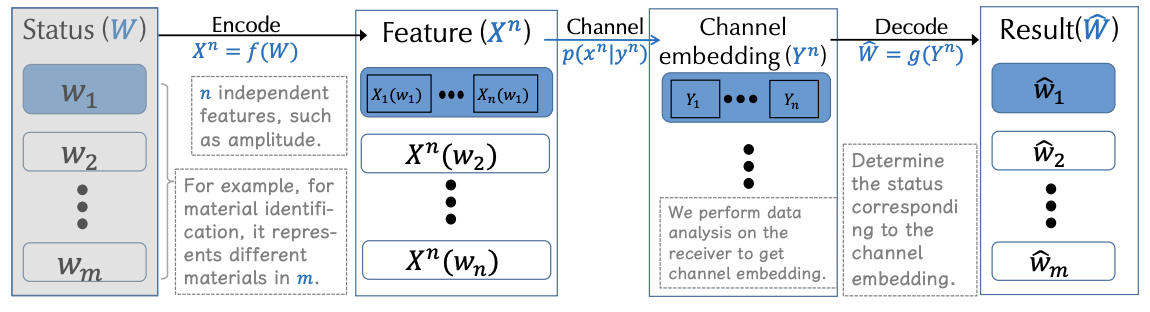
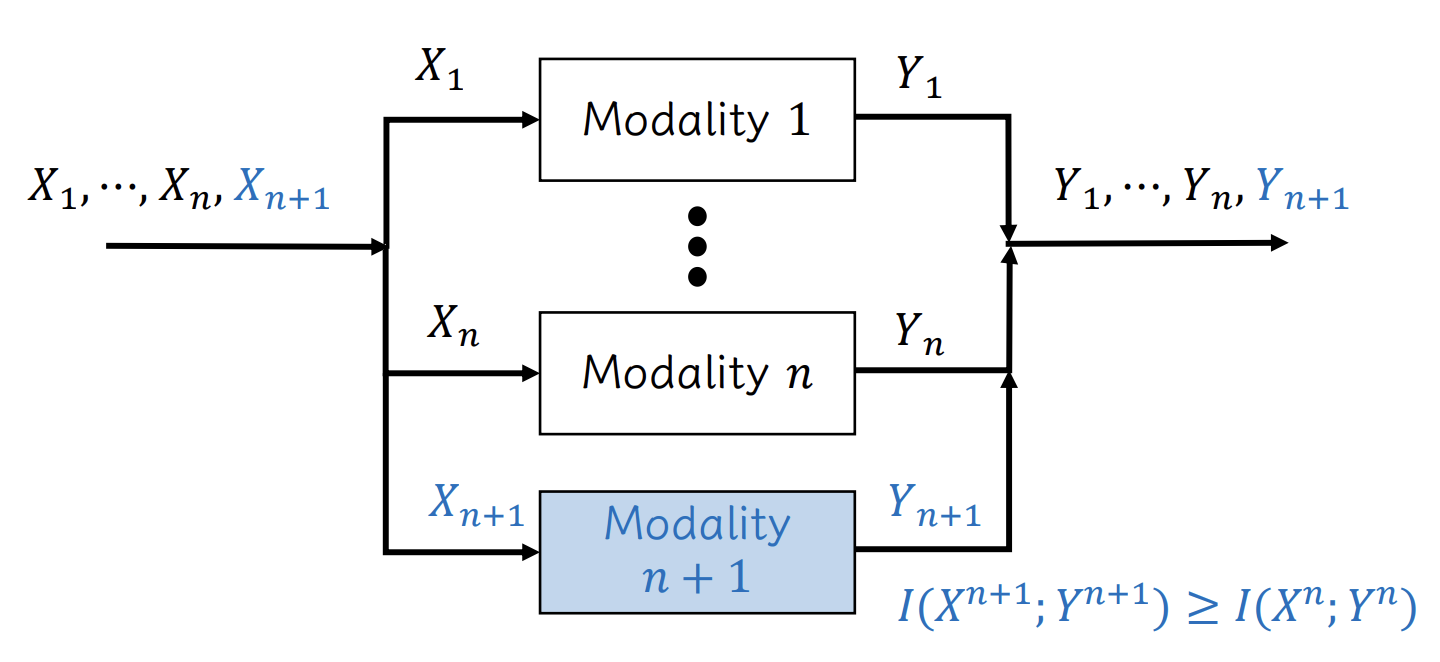
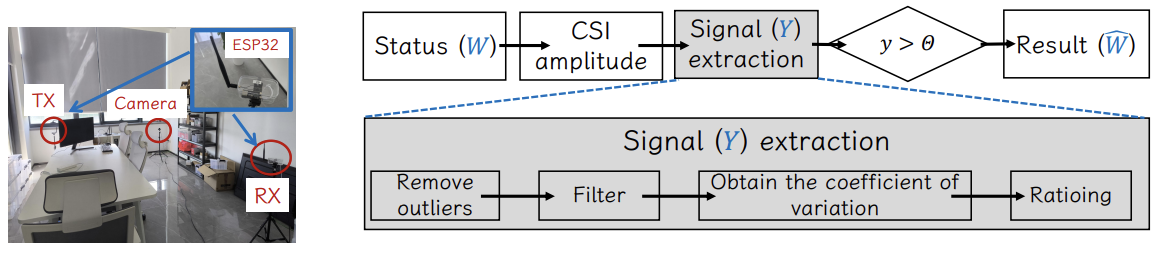
A typical sensing process often comprises several components: the target status to be sensed (\(W\)), the feature (\(X^n\)) designed to sense the status, the sensing channel embedding (\(Y^n\)) obtained through the sensing system, and the result (\(\hat{W}\)) derived after processing the signal.
Why do multimodal systems tend to exhibit superior performance?
Many previous research works have shown that using multi-modality for sensing helps achieve better performance, which can be explained by the theorem we proved previously.
Is data pre-processing a “cure-all” solution?
If the following equation holds, \[ H(W)-I(X^n;D^l) > 1, \] lossless sensing cannot be achieved simply by improving the effect of data preprocessing.

Case study
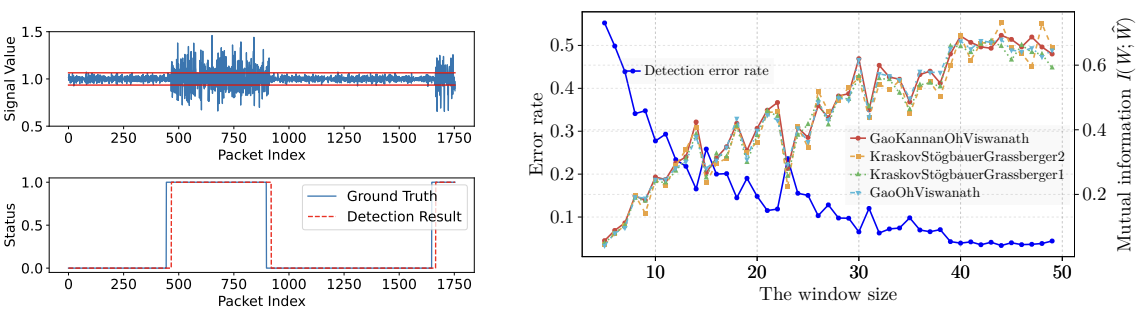
Human detection based on WiFi devices.
Case study
RFID-based electrical cabinet door direction monitoring.
Given the cost-effectiveness and ease of deployment of RFID tags, we have developed an algorithm for monitoring cabinet door status using multiple tags. Furthermore, we employ the mutual information of tasks, as proposed in this paper, to assess the system’s performance.

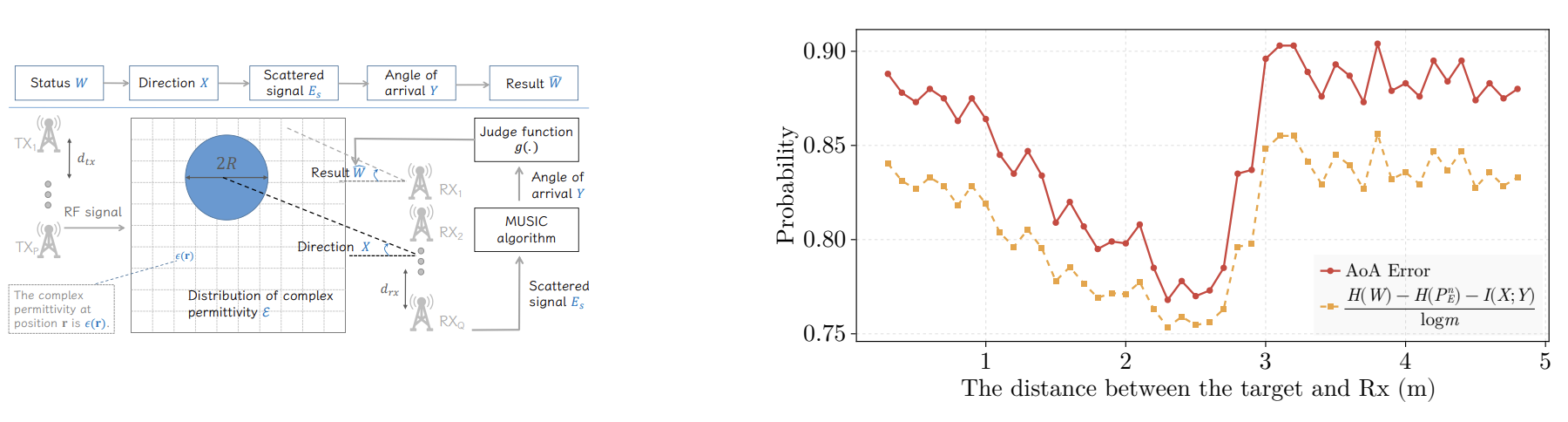
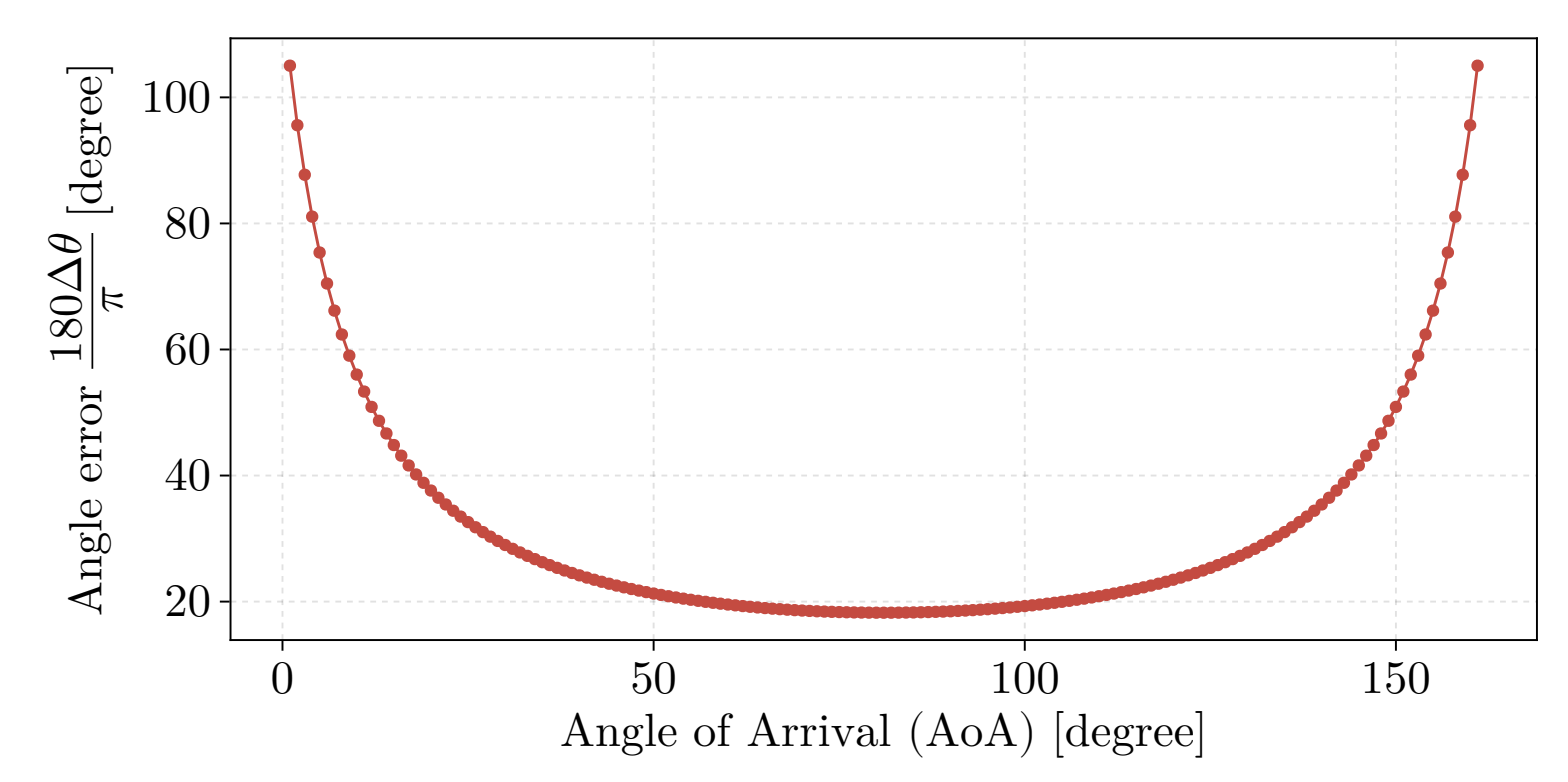
Direction estimation based on Music algorithm and electromagnetic signal.