RGB Matters: Learning 7-DoF Grasp Poses on Monocular RGBD Images
September 29, 2024
RGBD-Grasp
在本文中,我们介绍了rgbd-grasp,这是一种7自由度的抓取检测管道。我们将单眼RGBD图像作为输入,并输出6自由度抓手姿势以及抓手的宽度作为附加自由度。
方法
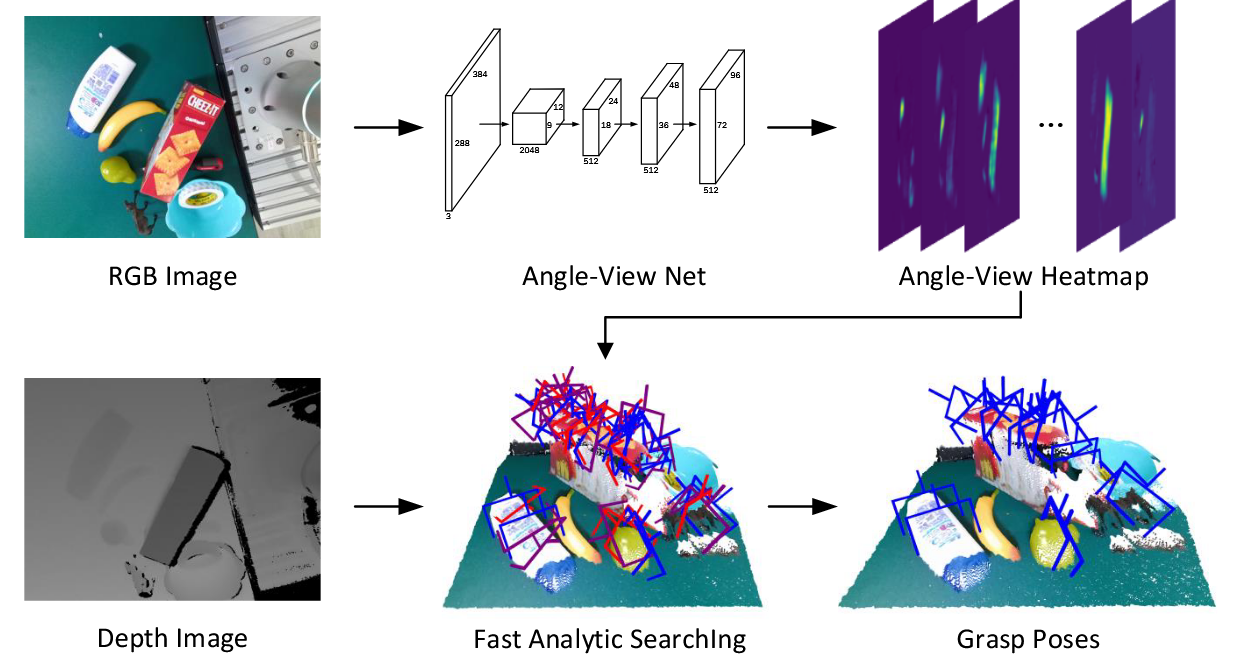
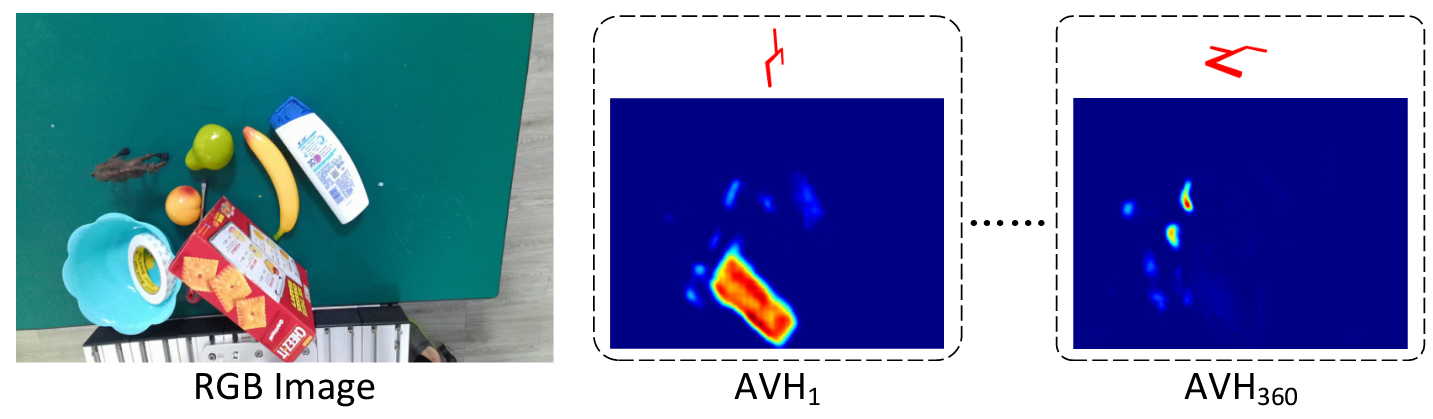
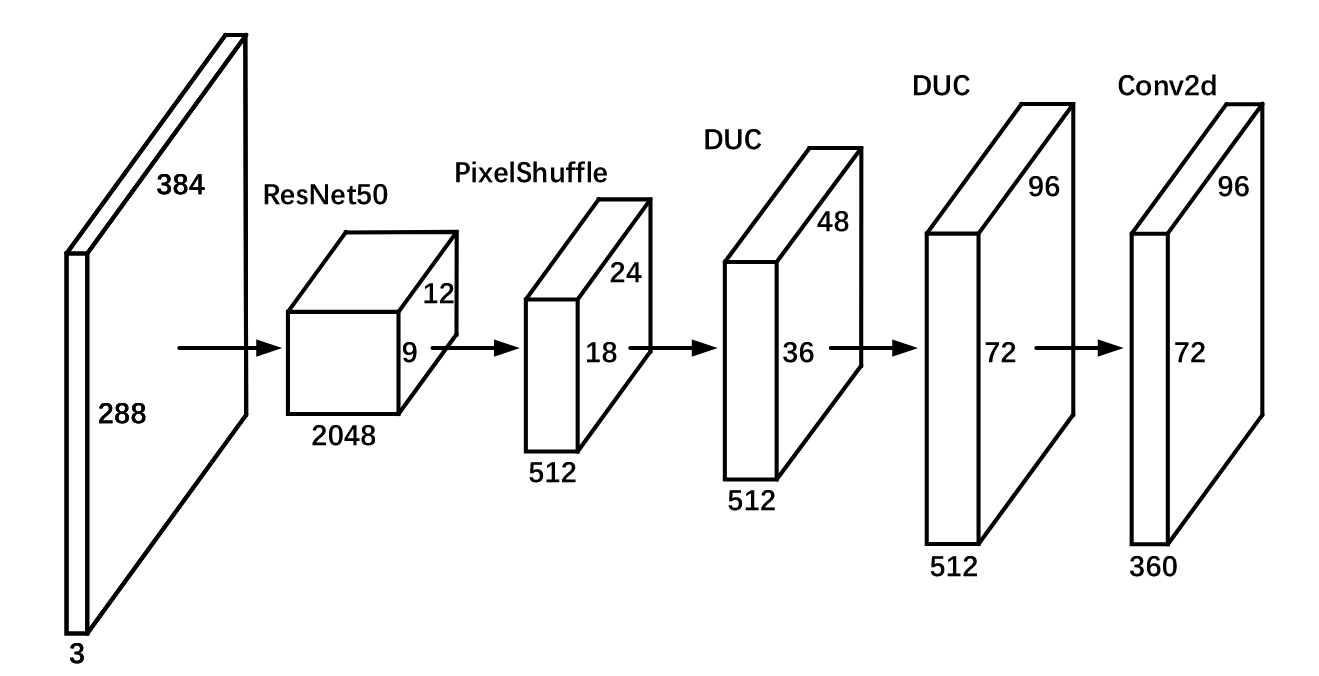
Angle-View Net
方法
Fast Analytic Searching
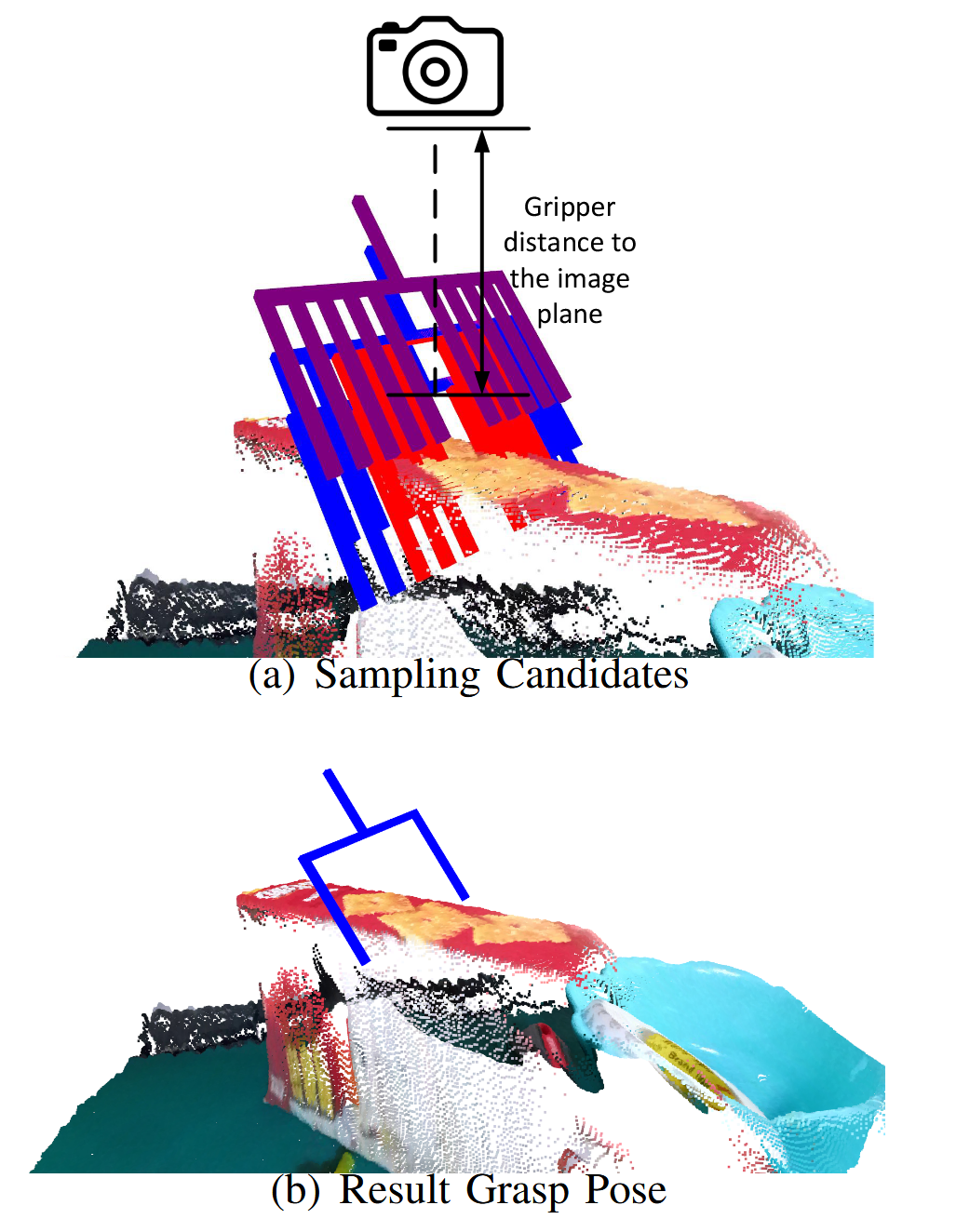
FAS模块的图示。上图: 点云由深度图像重建。对具有不同宽度和到图像平面的不同距离的候选者进行采样。我们对这些候选人进行碰撞和空检查。红色候选对象与场景点云碰撞,这违反了第一条规则。紫色的候选人在他们的抓取空间中没有意义,这违反了第二条规则。剩下的蓝色候选者被认为是良好的抓握姿势。下图: 在所有良好的抓握姿势中,我们进行抓握姿势非最大抑制,以找到距离最大,宽度最小的姿势。
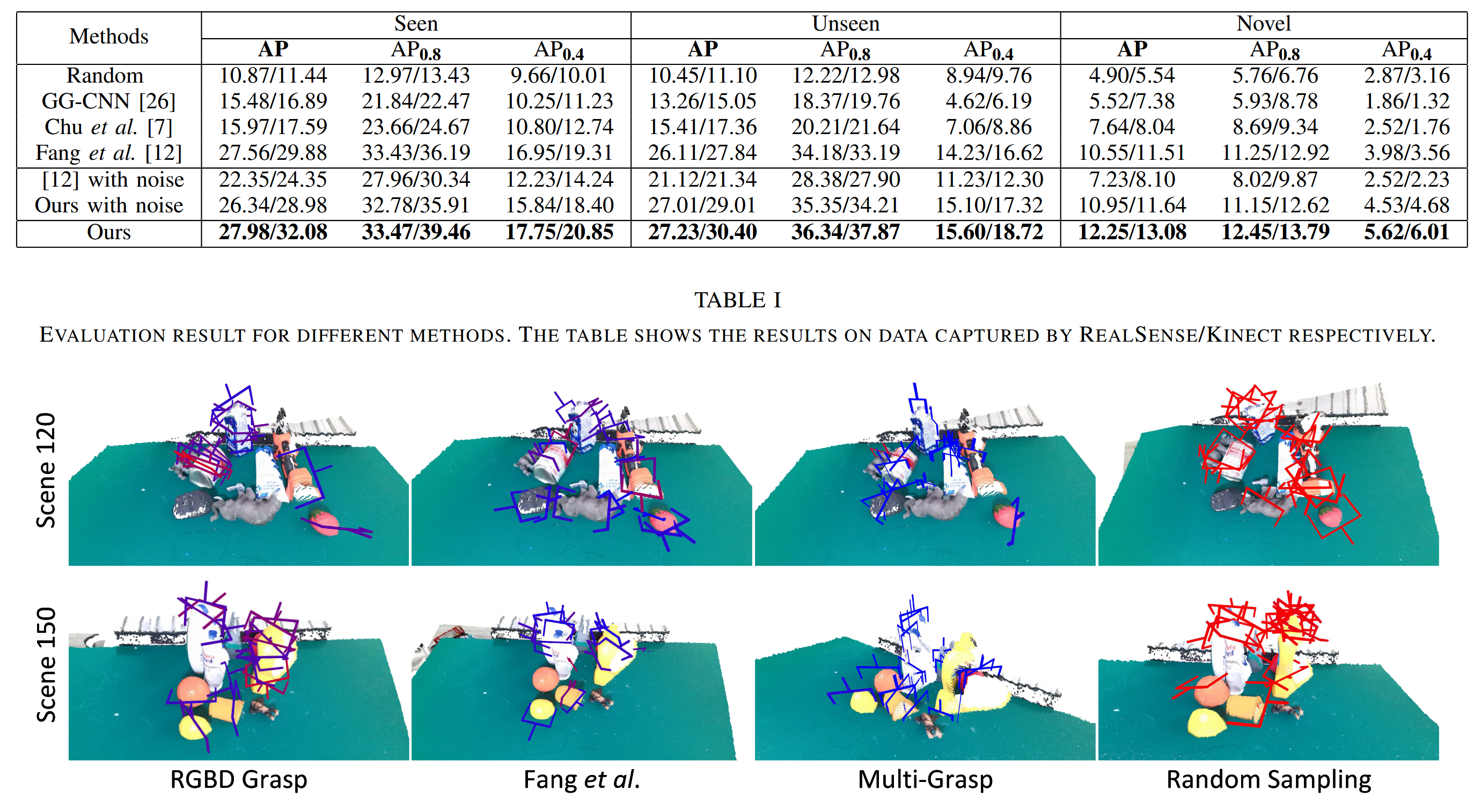
评估